sdbus-cpp
Using sdbus-c++ library
Table of contents
- Introduction
- Integrating sdbus-c++ into your project
- Solving sd-bus dependency
- Distributing sdbus-c++
- Header files and namespaces
- Error signalling and propagation
- Design of sdbus-c++
- Multiple layers of sdbus-c++ API
- An example: Number concatenator
- Implementing the Concatenator example using basic sdbus-c++ API layer
- Implementing the Concatenator example using convenience sdbus-c++ API layer
- Implementing the Concatenator example using generated C++ bindings
- Asynchronous server-side methods
- Asynchronous client-side methods
- Using D-Bus properties
- Standard D-Bus interfaces
- Representing D-Bus Types in sdbus-c++
- Adding user-defined types to the sdbus-c++ type system
- Support for match rules
- Using direct (peer-to-peer) D-Bus connections
- Using sdbus-c++ in external event loops
- Migrating to sdbus-c++ v2
- Conclusion
Introduction
sdbus-c++ is a C++ D-Bus library built on top of sd-bus, a lightweight D-Bus client library implemented within systemd project. It provides D-Bus functionality on a higher level of abstraction, trying to employ C++ type system to shift as much work as possible from the developer to the compiler.
Although sdbus-c++ covers most of sd-bus API, it does not (yet) fully cover every sd-bus API detail. The focus is put on the most widely used functionality: D-Bus connections, object, proxies, synchronous and asynchronous method calls, signals, and properties. If you are missing a desired functionality, you are welcome to submit an issue, or, best, to contribute to sdbus-c++ by submitting a pull request.
Integrating sdbus-c++ into your project
The library build system is based on CMake. The library provides a config and an export file, so integrating it into your CMake project is sooo simple:
# First, find sdbus-c++
find_package(sdbus-c++ REQUIRED)
# Use the sdbus-c++ target in SDBusCpp namespace
add_executable(exe exe.cpp)
target_link_libraries(exe PRIVATE SDBusCpp::sdbus-c++)
The library also supports pkg-config, so it easily be integrated into e.g. an Autotools project:
PKG_CHECK_MODULES(SDBUSCPP, [sdbus-c++ >= 0.6],,
AC_MSG_ERROR([You need the sdbus-c++ library (version 0.6 or newer)]
[http://www.kistler.com/])
)
Note: sdbus-c++ library uses a number of modern C++17 (and, conditionally, C++20) features. Please make sure you have a recent compiler (best gcc >= 10, clang >= 11).
If you intend to use xml-to-c++ generator tool (explained later) in your project to generate interface headers from XML, you can integrate that too with CMake or pkg-config:
# First, find sdbus-c++-tools
find_package(sdbus-c++-tools REQUIRED)
# Use the sdbus-c++-xml2cpp in SDBusCpp namespace to generate the headers
add_custom_command(
OUTPUT myproject-client-glue.h myproject-server-glue.h
COMMAND SDBusCpp::sdbus-c++-xml2cpp ${PROJECT_SOURCE_DIR}/dbus/myproject-bindings.xml
--proxy=myproject-client-glue.h --adaptor=myproject-server-glue.h
DEPENDS dbus/myproject-bindings.xml
COMMENT "Generating D-Bus interfaces for ${PROJECT_NAME}."
)
Solving sd-bus dependency
sdbus-c++ is a wrapper around sd-bus, a C library that has been written as part of systemd project.
Within systemd, sd-bus is implemented as part of libsystemd shared library. At least version 0.22.0 (which corresponds to the minimum systemd version 238) of libsystemd is needed.
If your target Linux distribution is already based on systemd ecosystem of version 238 and higher, then there is no additional effort, just make sure you have corresponding systemd header files available (provided by libsystemd-dev package on Debian/Ubuntu, for example), and you may go on building sdbus-c++ seamlessly.
However, sdbus-c++ can perfectly be used in non-systemd environments as well. If libsystemd is not found in the system when configuring sdbus-c++, then
-
sdbus-c++ will try to find
libelogind, which is an extracted logind from original systemd containing sd-bus implementation. If not found, then -
sdbus-c++ will try to find
basu, which is just sd-bus implementation extracted from systemd.
Alternatively to this fallback search sequence, you may explicitly instruct sdbus-c++ to use a specified sd-bus implementation through the SDBUSCPP_SDBUS_LIB CMake configuration option.
On systems where neither of those libraries is available, we can build sd-bus manually, or we can (conveniently) instruct sdbus-c++ to build and integrate sd-bus into itself for us.
Building and distributing libsystemd as a shared library yourself
Fortunately, libsystemd is rather self-contained and can be built and used independently of the rest of systemd ecosystem. To build libsystemd shared library for sdbus-c++:
$ git clone https://github.com/systemd/systemd
$ cd systemd
$ git checkout v242 # or any other recent stable version
$ mkdir build
$ cd build
$ meson --buildtype=release .. # solve systemd dependencies if any pop up, e.g. libmount-dev, libcap, librt...
$ ninja version.h # building version.h target is only necessary in systemd version >= 241
$ ninja libsystemd.so.0.26.0 # or another version number depending which systemd version you have
# finally, manually install the library, header files and libsystemd.pc pkgconfig file
Building and distributing libsystemd as part of sdbus-c++
sdbus-c++ provides SDBUSCPP_BUILD_LIBSYSTEMD configuration option. When turned on, sdbus-c++ will automatically download and build libsystemd as a static library and make it an opaque part of sdbus-c++ shared library for you. This is the most convenient and effective approach to build, distribute and use sdbus-c++ as a self-contained, systemd-independent library in non-systemd environments. Just make sure your build machine has all dependencies needed by libsystemd build process. That includes, among others, meson, ninja, git, gperf, and – primarily – libraries and library headers for libmount, libcap and librt (part of glibc). Also, when distributing, make sure these dependency libraries are installed on the production machine.
You may additionally set the SDBUSCPP_LIBSYSTEMD_VERSION configuration flag to fine-tune the version of systemd to be taken in. (The default value is 242, the minimum value is 239).
Distributing sdbus-c++
Yocto
There are Yocto recipes for sdbus-c++ available in the meta-oe layer of the meta-openembedded project. There are two recipes:
- One for sdbus-c++ itself. It detects whether systemd feature is turned on in the poky linux configuration. If so, it simply depends on systemd and makes use of libsystemd shared library available in the target system. Otherwise it automatically downloads and builds libsystemd static library and links it into the sdbus-c++ shared library. The recipe also supports ptest.
- One for sdbus-c++ native tools, namely sdbus-c++ code generator to generate C++ adaptor and proxy binding classes.
Tip: If you get
ERROR: Program or command 'getent' not found or not executablewhen building sdbus-c++ in Yocto, please make sure you’ve addedgetenttoHOSTTOOLS. For example, you can addHOSTTOOLS_NONFATAL += "getent"into your local.conf file.
Conan
sdbus-c++ recipe is available in ConanCenter repository as sdbus-cpp.
Buildroot
There is the Buildroot package sdbus-cpp to build sdbus-c++ library itself without a code generation tool.
Contributors willing to help with bringing sdbus-c++ to other popular package systems are welcome.
Verifying sdbus-c++
You can build and run sdbus-c++ unit and integration tests to verify sdbus-c++ build:
$ cd build
$ cmake .. -DBUILD_TESTS=ON
$ sudo cp ../tests/integrationtests/files/org.sdbuscpp.integrationtests.conf /etc/dbus-1/system.d/
$ cmake --build . --target test
Header files and namespaces
All sdbus-c++ header files reside in the sdbus-c++ subdirectory within the standard include directory. Users can either include individual header files, like so:
#include <sdbus-c++/IConnection.h>
#include <sdbus-c++/IProxy.h>
or just include the global header file that pulls in everything:
#include <sdbus-c++/sdbus-c++.h>
All public types and functions of sdbus-c++ reside in the sdbus namespace.
Error signalling and propagation
sdbus::Error type is used as an exception to signal errors in sdbus-c++. There are two types of errors:
- D-Bus related errors, like call timeouts, failed socket allocation, etc. These are raised by the D-Bus library or D-Bus daemon itself.
- user-defined errors, i.e. errors signalled and propagated from remote methods back to the caller. So these are issued by sdbus-c++ clients.
sdbus::Error is a carrier for both types of errors, carrying the error name and error message with it.
Design of sdbus-c++
The following diagram illustrates the major entities in sdbus-c++.
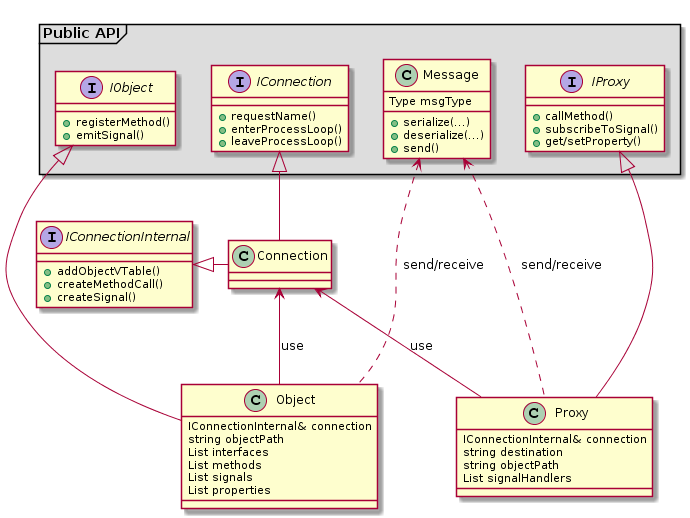
IConnection represents the concept of a D-Bus connection. You can connect to either the system bus or a session bus. Services can assign well-known service names to those connections. An I/O event loop should be run on the bus connection.
IObject represents the concept of an object that exposes its methods, signals and properties. Its responsibilities are:
- registering (possibly multiple) interfaces and methods, signals, properties on those interfaces,
- emitting signals.
IProxy represents the concept of the proxy, which is a view of the Object from the client side. Its responsibilities are:
- invoking remote methods of the corresponding object, in both synchronous and asynchronous way,
- registering handlers for signals,
Message class represents a message, which is the fundamental DBus concept. There are three distinctive types of message that are derived from the Message class:
MethodCall(be it synchronous or asynchronous method call, with serialized parameters),MethodReply(with serialized return values),Signal(with serialized parameters),PropertySetCall(with serialized parameter value to be set)PropertyGetReply(where property value shall be stored)PlainMessage(for internal purposes).
Thread safety in sdbus-c++
sdbus-c++ is completely thread-aware by design. Though sdbus-c++ is not thread-safe in general, there are situations where sdbus-c++ provides and guarantees API-level thread safety by design. It is safe to do these operations (operations within the bullet points, not across them) from multiple threads at the same time:
- Making or destroying distinct
Object/Proxyinstances simultaneously (even on a shared connection that is running an event loop already, see below). Under making here is meant a complete sequence of construction, registration of method/signal/property callbacks and export of theObject/Proxyso it is ready to issue/receive messages. This sequence must be completely done within the context of one thread. - Creating and sending asynchronous method replies on an
Objectinstance. - Creating and emitting signals on an
Objectinstance. - Creating and sending method calls (both synchronously and asynchronously) on an
Proxyinstance. (But it’s generally better that our threads use their own exclusive instances of proxy, to minimize shared state and contention.)
sdbus-c++ is designed such that all the above operations are thread-safe also on a connection that is running an event loop (usually in a separate thread) at that time. It’s an internal thread safety. For example, a signal arrives and is processed by sdbus-c++ even loop at an appropriate Proxy instance, while the user is going to destroy that instance in their application thread. The user cannot explicitly control these situations (or they could, but that would be very limiting and cumbersome on the API level).
However, other combinations, that the user invokes explicitly from within more threads are NOT thread-safe in sdbus-c++ by design, and the user should make sure by their design that these cases never occur. For example, destroying an Object instance in one thread while emitting a signal on it in another thread is not thread-safe. In this specific case, the user should make sure in their application that all threads stop working with a specific instance before a thread proceeds with deleting that instance.
Multiple layers of sdbus-c++ API
sdbus-c++ API comes in two layers:
- the basic layer, which is a simple wrapper layer on top of sd-bus, using mechanisms that are native to C++ (e.g. serialization/deserialization of data from messages),
- the convenience layer, building on top of the basic layer, which aims at alleviating users from unnecessary details and enables them to write shorter, safer, and more expressive code.
sdbus-c++ also ships with sdbus-c++-xml2cpp tool that converts D-Bus IDL in XML format into C++ bindings for the adaptor as well as the proxy part. This is the highest level of API provided by sdbus-c++ (the “C++ bindings layer”), which makes it possible for D-Bus RPC calls to completely look like native C++ calls on a local object.
An example: Number concatenator
Let’s have an object /org/sdbuscpp/concatenator that implements the org.sdbuscpp.concatenator interface. The interface exposes the following:
- a
concatenatemethod that takes a collection of integers and a separator string and returns a string that is the concatenation of all integers from the collection using given separator, - a
concatenatedsignal that is emitted at the end of each successful concatenation.
In the following sections, we will elaborate on the ways of implementing such an object on both the server and the client side.
Before running Concatenator example in your system: In order for your service to be allowed to provide a D-Bus API on ** the system bus*, a D-Bus security policy file has to be put in place for that service. Otherwise the service will fail to start (you’ll get
[org.freedesktop.DBus.Error.AccessDenied] Failed to request bus name (Permission denied), for example). To make the Concatenator example work in your system, look in this section of systemd configuration for how to name the file, where to place it, how to populate it. For further information, consult dbus-daemon documentation, sections *INTEGRATING SYSTEM SERVICES and CONFIGURATION FILE. As an example used for sdbus-c++ integration tests, you may look at the policy file for sdbus-c++ integration tests.
Implementing the Concatenator example using basic sdbus-c++ API layer
In the basic API layer, we already have abstractions for D-Bus connections, objects and object proxies, with which we can interact via their interface classes (IConnection, IObject, IProxy), but, analogously to the underlying sd-bus C library, we still work on the level of D-Bus messages. We need to
- create them,
- serialize/deserialize arguments to/from them (thanks to many overloads of C++ insertion/extraction operators, this is very simple),
- send them over to the other side.
This is how a simple Concatenator service implemented upon the basic sdbus-c++ API could look like:
Server side
#include <sdbus-c++/sdbus-c++.h>
#include <vector>
#include <string>
// Yeah, global variable is ugly, but this is just an example and we want to access
// the concatenator instance from within the concatenate method handler to be able
// to emit signals.
sdbus::IObject* g_concatenator{};
void concatenate(sdbus::MethodCall call)
{
// Deserialize the collection of numbers from the message
std::vector<int> numbers;
call >> numbers;
// Deserialize separator from the message
std::string separator;
call >> separator;
// Return error if there are no numbers in the collection
if (numbers.empty())
throw sdbus::Error(sdbus::Error::Name{"org.sdbuscpp.Concatenator.Error"}, "No numbers provided");
std::string result;
for (auto number : numbers)
{
result += (result.empty() ? std::string() : separator) + std::to_string(number);
}
// Serialize resulting string to the reply and send the reply to the caller
auto reply = call.createReply();
reply << result;
reply.send();
// Emit 'concatenated' signal
sdbus::InterfaceName interfaceName{"org.sdbuscpp.Concatenator"};
sdbus::SignalName signalName{"concatenated"};
auto signal = g_concatenator->createSignal(interfaceName, signalName);
signal << result;
g_concatenator->emitSignal(signal);
}
int main(int argc, char *argv[])
{
// Create D-Bus connection to (either the session or system) bus and requests a well-known name on it.
sdbus::ServiceName serviceName{"org.sdbuscpp.concatenator"};
auto connection = sdbus::createBusConnection(serviceName);
// Create concatenator D-Bus object.
sdbus::ObjectPath objectPath{"/org/sdbuscpp/concatenator"};
auto concatenator = sdbus::createObject(*connection, std::move(objectPath));
g_concatenator = concatenator.get();
// Register D-Bus methods and signals on the concatenator object, and exports the object.
sdbus::InterfaceName interfaceName{"org.sdbuscpp.Concatenator"};
concatenator->addVTable( sdbus::MethodVTableItem{sdbus::MethodName{"concatenate"}, sdbus::Signature{"ais"}, {}, sdbus::Signature{"s"}, {}, &concatenate, {}}
, sdbus::SignalVTableItem{sdbus::MethodName{"concatenated"}, sdbus::Signature{"s"}, {}, {}} )
.forInterface(interfaceName);
// Run the I/O event loop on the bus connection.
connection->enterEventLoop();
}
We establish a D-Bus system connection and request org.sdbuscpp.concatenator D-Bus name on it. This name will be used by D-Bus clients to find the service. We then create an object with path /org/sdbuscpp/concatenator on this connection. We add a so-called object vtable, where we declare and describe its D-Bus API, i.e. its interface, methods, signals, properties (if any) that the object provides. Then we need to make sure to run the event loop upon the connection, which handles all incoming, outgoing and other requests.
Tip: There’s also an overload of
addVTable()method withreturn_slot_ttag parameter which returns aSlotobject. The slot is a simple RAII-based handle of the associated vtable registration. As long as you keep the slot object, the vtable registration is active. When you let go of the slot, the vtable is automatically removed from the D-Bus object. This gives you the ability to implement “dynamic” D-Bus object API that is addable as well as removable at any time during object lifetime.
Note: A D-Bus object can have any number of vtables attached to it. Even a D-Bus interface of an object can have multiple vtables attached to it.
The callback for any D-Bus object method on this level is any callable of signature void(sdbus::MethodCall call). The call parameter is the incoming method call message. We need to deserialize our method input arguments from it. Then we can invoke the logic of the method and get the results. Then for the given call, we create a reply message, pack results into it and send it back to the caller through send(). (If we had a void-returning method, we’d just send an empty reply back.) We also fire a signal with the results. To do this, we need to create a signal message via object’s createSignal(), serialize the results into it, and then send it out to subscribers by invoking object’s emitSignal().
Please note that we can create and destroy D-Bus objects on a connection dynamically, at any time during runtime, even while there is an active event loop upon the connection. So managing D-Bus objects’ lifecycle (creating, exporting and destroying D-Bus objects) is completely thread-safe.
Client side
#include <sdbus-c++/sdbus-c++.h>
#include <vector>
#include <string>
#include <iostream>
#include <unistd.h>
void onConcatenated(sdbus::Signal signal)
{
std::string concatenatedString;
signal >> concatenatedString;
std::cout << "Received signal with concatenated string " << concatenatedString << std::endl;
}
int main(int argc, char *argv[])
{
// Create proxy object for the concatenator object on the server side. Since here
// we are creating the proxy instance without passing connection to it, the proxy
// will create its own connection automatically (to either system bus or session bus,
// depending on the context).
sdbus::ServiceName destination{"org.sdbuscpp.concatenator"};
sdbus::ObjectPath objectPath{"/org/sdbuscpp/concatenator"};
auto concatenatorProxy = sdbus::createProxy(std::move(destination), std::move(objectPath));
// Let's subscribe for the 'concatenated' signals
sdbus::InterfaceName interfaceName{"org.sdbuscpp.Concatenator"};
sdbus::SignalName signalName{"concatenated"};
concatenatorProxy->registerSignalHandler(interfaceName, signalName, &onConcatenated);
std::vector<int> numbers = {1, 2, 3};
std::string separator = ":";
sdbus::MethodName concatenate{"concatenate"};
// Invoke concatenate on given interface of the object
{
auto method = concatenatorProxy->createMethodCall(interfaceName, concatenate);
method << numbers << separator;
auto reply = concatenatorProxy->callMethod(method);
std::string result;
reply >> result;
assert(result == "1:2:3");
}
// Invoke concatenate again, this time with no numbers and we shall get an error
{
auto method = concatenatorProxy->createMethodCall(interfaceName, concatenate);
method << std::vector<int>() << separator;
try
{
auto reply = concatenatorProxy->callMethod(method);
assert(false);
}
catch(const sdbus::Error& e)
{
std::cerr << "Got concatenate error " << e.getName() << " with message " << e.getMessage() << std::endl;
}
}
// Give sufficient time to receive 'concatenated' signal from the first concatenate invocation
sleep(1);
return 0;
}
In simple cases, we don’t need to create D-Bus connection explicitly for our proxies. We either pass a connection object to the proxy upon creation, or otherwise the proxy will create a connection of his own (to either the session bus or the system bus, depending on the context, see man sd_bus_open). This is the case in the example above. (This approach is not scalable and resource-saving if we have plenty of proxies; see section Working with D-Bus connections for elaboration.) So, in the example, we create a proxy for object /org/sdbuscpp/concatenator publicly available at bus org.sdbuscpp.concatenator. We register handlers for signals we are interested in (if any).
The callback for a D-Bus signal handler on this level is any callable of signature void(sdbus::Signal signal). The one and only parameter signal is the incoming signal message. We need to deserialize arguments from it, and then we can do our business logic with it.
Tip: There’s also an overload of
registerSignalHandler()withreturn_slot_ttag which returns aSlotobject. The slot is a simple RAII-based handle of the subscription. As long as you keep the slot object, the signal subscription is active. When you let go of the object, the signal handler is automatically unregistered. This gives you finer control over the lifetime of signal subscription.
Subsequently, we invoke two RPC calls to object’s concatenate() method. We create a method call message by invoking proxy’s createMethodCall(). We serialize method input arguments into it, and make a synchronous call via proxy’s callMethod(). As a return value we get the reply message as soon as it arrives. We deserialize return values from that message, and further use it in our program. The second concatenate() RPC call is done with invalid arguments, so we get a D-Bus error reply from the service, which as we can see is manifested via sdbus::Error exception being thrown.
Please note that we can create and destroy D-Bus object proxies dynamically, at any time during runtime, even when they share a common D-Bus connection and there is an active event loop upon the connection. So managing D-Bus object proxies’ lifecycle (creating and destroying D-Bus object proxies) is completely thread-safe.
Opening bus connections in sdbus-c++
There are several factory methods to create a bus connection object in sdbus-c++:
createBusConnection()- opens a connection to the session bus when in a user context, and a connection to the system bus, otherwisecreateBusConnection(const sdbus::ServiceName& name)- opens a connection to the session bus when in a user context, and a connection with the given name to the system bus, otherwise, and requests the given well-known service name on the buscreateSystemBusConnection()- opens a connection to the system buscreateSystemBusConnection(const sdbus::ServiceName& name)- opens a connection to the system bus, and requests the given well-known service name on the buscreateSessionBusConnection()- opens a connection to the session buscreateSessionBusConnection(const sdbus::ServiceName& name)- opens a connection to the session bus, and requests the given well-known service name on the bus.createSessionBusConnectionWithAddress(const std::string& address)- opens a connection to the session bus at a custom addresscreateRemoteSystemBusConnection(const std::string& host)- opens a connection to the system bus on a remote host using sshcreateDirectBusConnection(const std::string& address)- opens direct D-Bus connection at a custom address (see Using direct (peer-to-peer) D-Bus connections)createDirectBusConnection(int fd)- opens direct D-Bus connection at the given file descriptor (see Using direct (peer-to-peer) D-Bus connections)createServerBus(int fd)- opens direct D-Bus connection at the given file descriptor as a server (see Using direct (peer-to-peer) D-Bus connections)createBusConnection(sd_bus *bus)- creates a connection directly from the underlying sd_bus connection instance (which has been created and set up upfront directly through sd-bus API).
For more information, peek into IConnection.h where these functions are declared and documented.
Working with D-Bus connections in sdbus-c++
The design of D-Bus connections in sdbus-c++ allows for certain flexibility and enables users to choose simplicity over scalability or scalability (at a finer granularity of user’s choice) at the cost of slightly decreased simplicity.
How shall we use connections in relation to D-Bus objects and object proxies?
A D-Bus connection is represented by a IConnection instance. Each connection needs an event loop being run upon it. So it needs a thread handling the event loop. This thread serves all incoming and outgoing messages and all communication towards D-Bus daemon. One process can have one but also multiple D-Bus connections (we just have to make certain that the connections with assigned bus names don’t share a common name; the name must be unique).
A typical use case for most services is one D-Bus connection in the application. The application runs an (internal or external, see below) event loop on that connection. When creating objects or proxies, the application provides reference of that connection to those objects and proxies. This means all these objects and proxies share the same connection. This is nicely scalable, because with whatever number of objects or proxies, there is only one connection and one event loop thread. Yet, services that provide objects at various bus names have to create and maintain multiple D-Bus connections, each with the unique bus name.
The connection is thread-safe and objects and proxies can invoke operations on it from multiple threads simultaneously, but the operations are serialized. Access to the connection is mutually exclusive. This means, for example, that if an object’s callback for an incoming remote method call is going to be invoked in an event loop thread, and in another thread we use a proxy to call remote method in another process, the threads are contending and only one can go on while the other must wait and can only proceed after the first one has finished, because both are using a shared resource – the connection.
When a poll() sleeps upon the connection, the connection can be used by other threads without blocking. When calling a D-Bus method through a proxy synchronously, the proxy blocks the connection from concurrent use until it gets from the peer a reply (or an error, the call times out). Async D-Bus method calls don’t block the connection while the call is pending (the connection is only “locked” while the call message is sent out and while the reply handler is executed for an already arrived reply message, but not in between while the call is pending). See doxygen documentation for IProxy::callMethod() overloads for more details.
We should bear these design aspects of sdbus-c++ in mind when designing more complex, multi-threaded services with high parallelism. If we have undesired contention on a connection, creating a separate, dedicated connection for a hot spot helps to increase concurrency. sdbus-c++ provides us freedom to create as many connections as we want and assign objects and proxies to those connections at our will. We, as application developers, choose whatever approach is more suitable to us at quite a fine granularity.
So, more technically, how can we use connections from the server and the client perspective?
Using D-Bus connections on the server side
On the server side, we generally need to create D-Bus objects and publish their APIs. For that we first need a connection with a unique bus name. We need to create the D-Bus connection manually ourselves, request bus name on it, and manually launch:
- its internal event loop
- either in a blocking way, through
enterEventLoop(), - or in a non-blocking async way, through
enterEventLoopAsync(),
- either in a blocking way, through
- or an external event loop. This is suitable if we use in our application an event loop implementation of our choice (e.g., sd-event, GLib Event Loop, boost::asio, …) and we want to hook up our sdbus-c++ connections with it. See Using sdbus-c++ in external event loops section for more information.
The object takes the D-Bus connection as a reference in its constructor. This is the only way to wire the connection and the object together. We must make sure the connection exists as long as objects using it exist.
Of course, at any time before or after running the event loop on the connection, we can create and “hook”, as well as remove, objects and proxies upon that connection.
Note: There may be both objects and proxies hooked to a single connection, of course. A D-Bus server application may also be a client to another D-Bus server application, and share one D-Bus connection for the D-Bus interface it exports as well as for the proxies towards other D-Bus interfaces.
Using D-Bus connections on the client side
On the client side we likewise need a connection – just that unlike on the server side, we don’t need to request a unique bus name on it. We have more options here when creating a proxy:
-
Pass an already existing connection as a reference. This is the typical approach when the application already maintains a D-Bus connection (maybe it provide D-Bus API on it, and/or it already has some proxies hooked on it). The proxy will share the connection with others. With this approach we must of course ensure that the connection exists as long as the proxy exists. For discussion on options for running an event loop on that connection, see above section Using D-Bus connections on the server side.
-
Or – and this is a simpler approach for simple D-Bus client applications – we have another option: we let the proxy maintain its own connection (and potentially an associated event loop thread, see below). We have two options here:
-
We either create the connection ourselves and
std::moveit to the proxy object factory. The proxy becomes an owner of this connection, and it will be his dedicated connection. This has the advantage that we may choose the type of connection (system, session, remote). Additionally,- when created without
dont_run_event_loop_thread_ttag, the proxy will start a dedicated event loop thread on that connection; - or, when created with
dont_run_event_loop_thread_ttag, the proxy will start no event loop thread on that connection.
- when created without
-
Or we don’t care about connections at all (proxy factory overloads with no connection parameter). Under the hood, the proxy creates its own connection, to either the session bus (when in a user context) or the system bus otherwise. Additionally:
- when created without
dont_run_event_loop_thread_ttag, the proxy will start a dedicated event loop thread on that connection; - or, when created with
dont_run_event_loop_thread_ttag, the proxy will start no event loop thread on that connection.
- when created without
A proxy needs an event loop if it’s a “long-lived” proxy that listens on incoming messages like signals, async call replies, atc. Sharing one connection with its one event loop is more scalable. Starting a dedicated event loop in a proxy is simpler from API perspective, but comes at a performance and resource cost for each proxy creation/destruction, and it hurts scalability. A simple and scalable option are “short-lived, light-weight” proxies. Quite a typical use case is that we occasionally need to carry out one or a few D-Bus calls and that’s it. We may create a proxy, do the calls, and let go of proxy. Such a light-weight proxy is created when
dont_run_event_loop_thread_ttag is passed to the proxy factory (or withcreateLightWeightProxy()). Such a proxy does not spawn an event loop thread. It only support synchronous D-Bus calls (no signals, no async calls…), and is meant to be created, used right away, and then destroyed immediately. -
Stopping internal I/O event loops graciously
A connection with an asynchronous event loop (i.e. one initiated through enterEventLoopAsync()) will stop and join its event loop thread automatically in its destructor. An event loop that blocks in the synchronous enterEventLoop() call can be unblocked through leaveEventLoop() call on the respective bus connection issued from a different thread or from an OS signal handler.
Implementing the Concatenator example using convenience sdbus-c++ API layer
One of the major sdbus-c++ design goals is to make the sdbus-c++ API easy to use correctly, and hard to use incorrectly.
The convenience API layer abstracts the concept of underlying D-Bus messages away completely. It abstracts away D-Bus signatures. The interface uses small, focused functions, with a few parameters only, to form a chained function statement that reads like a human language sentence. To achieve that, sdbus-c++ utilizes the power of the C++ type system, which deduces and resolves a lot of things at compile time, and the run-time performance cost compared to the basic layer is close to zero.
Thus, in the end of the day, the code written using the convenience API is:
- more expressive,
- at a higher level of abstraction (closer to the abstraction level of the problem being solved),
- significantly shorter,
- almost as fast as one written using the basic API layer.
The code written using this layer expresses in a declarative way what it does, rather than how. Let’s look at code samples.
Server side
#include <sdbus-c++/sdbus-c++.h>
#include <vector>
#include <string>
int main(int argc, char *argv[])
{
// Create D-Bus connection to the (either system or session) bus and requests a well-known name on it.
sdbus::ServiceName serviceName{"org.sdbuscpp.concatenator"};
auto connection = sdbus::createBusConnection(serviceName);
// Create concatenator D-Bus object.
sdbus::ObjectPath objectPath{"/org/sdbuscpp/concatenator"};
auto concatenator = sdbus::createObject(*connection, std::move(objectPath));
auto concatenate = [&concatenator](const std::vector<int> numbers, const std::string& separator)
{
// Return error if there are no numbers in the collection
if (numbers.empty())
throw sdbus::Error(sdbus::Error::Name{"org.sdbuscpp.Concatenator.Error"}, "No numbers provided");
std::string result;
for (auto number : numbers)
{
result += (result.empty() ? std::string() : separator) + std::to_string(number);
}
// Emit 'concatenated' signal
concatenator->emitSignal("concatenated").onInterface("org.sdbuscpp.Concatenator").withArguments(result);
return result;
};
// Register D-Bus methods and signals on the concatenator object, and exports the object.
concatenator->addVTable(sdbus::registerMethod("concatenate").implementedAs(std::move(concatenate)),
sdbus::registerSignal("concatenated").withParameters<std::string>())
.forInterface("org.sdbuscpp.Concatenator");
// Run the loop on the connection.
connection->enterEventLoop();
}
Tip: There’s also an overload of
addVTable(...).forInterface()method withreturn_slot_ttag parameter which returns aSlotobject. The slot is a simple RAII-based handle of the associated vtable registration. As long as you keep the slot object, the vtable registration is active. When you let go of the slot, the vtable is automatically removed from the D-Bus object. This gives you the ability to implement “dynamic” D-Bus object API that is addable as well as removable at any time during object lifetime.
Note: A D-Bus object can have any number of vtables attached to it. Even a D-Bus interface of an object can have multiple vtables attached to it.
Client side
#include <sdbus-c++/sdbus-c++.h>
#include <vector>
#include <string>
#include <iostream>
#include <unistd.h>
void onConcatenated(const std::string& concatenatedString)
{
std::cout << "Received signal with concatenated string " << concatenatedString << std::endl;
}
int main(int argc, char *argv[])
{
// Create proxy object for the concatenator object on the server side
sdbus::ServiceName destination{"org.sdbuscpp.concatenator"};
sdbus::ObjectPath objectPath{"/org/sdbuscpp/concatenator"};
auto concatenatorProxy = sdbus::createProxy(std::move(destination), std::move(objectPath));
// Let's subscribe for the 'concatenated' signals
sdbus::InterfaceName interfaceName{"org.sdbuscpp.Concatenator"};
concatenatorProxy->uponSignal("concatenated").onInterface(interfaceName).call([](const std::string& str){ onConcatenated(str); });
std::vector<int> numbers = {1, 2, 3};
std::string separator = ":";
// Invoke concatenate on given interface of the object
{
std::string concatenatedString;
concatenatorProxy->callMethod("concatenate").onInterface(interfaceName).withArguments(numbers, separator).storeResultsTo(concatenatedString);
assert(concatenatedString == "1:2:3");
}
// Invoke concatenate again, this time with no numbers and we shall get an error
{
try
{
concatenatorProxy->callMethod("concatenate").onInterface(interfaceName).withArguments(std::vector<int>(), separator);
assert(false);
}
catch(const sdbus::Error& e)
{
std::cerr << "Got concatenate error " << e.getName() << " with message " << e.getMessage() << std::endl;
}
}
// Give sufficient time to receive 'concatenated' signal from the first concatenate invocation
sleep(1);
return 0;
}
When registering methods, calling methods or emitting signals, multiple lines of code have shrunk into simple one-liners. Signatures of provided callbacks are introspected and types of provided arguments are deduced at compile time, so the D-Bus signatures as well as serialization and deserialization of arguments to and from D-Bus messages are generated for us completely by the compiler.
Tip: There’s also an overload of
uponSignal(...).call()withreturn_slot_ttag which returns aSlotobject. The slot is a simple RAII-based handle of the subscription. As long as you keep the slot object, the signal subscription is active. When you let go of the object, the signal handler is automatically unregistered. This gives you finer control over the lifetime of signal subscription.
We recommend that sdbus-c++ users prefer the convenience API to the lower level, basic API. When feasible, using generated adaptor and proxy C++ bindings is even better as it provides yet slightly higher abstraction built on top of the convenience API, where remote calls look simply like local, native calls of object methods. They are described in the following section.
Note: By default, signal callback handlers are not invoked (i.e., the signal is silently dropped) if there is a signal signature mismatch. If you want to be informed of such situations, you can add
std::optional<sdbus::Error>parameter to the beginning of your signal callback handler’s parameter list. When sdbus-c++ invokes the handler, it will set this argument either to be empty (in normal cases), or to carry a correspondingsdbus::Errorobject (in case of deserialization failures, like type mismatches). An example of a handler with the signature (int) different from the real signal contents (string):void onConcatenated(std::optional<sdbus::Error> err, int wrongParameter) { assert(err.has_value()); assert(err->getMessage() == "Failed to deserialize a int32 value"); }Signature mismatch in signal handlers is probably the most common reason why signals are not received in the client, while we can see them on the bus with
dbus-monitor. Usestd::optional<sdbus::Error>-based callback variant and inspect the error to check if that’s the cause of your problems.
Tip: When registering a D-Bus object, we can additionally provide names of input and output parameters of its methods and names of parameters of its signals. When the object is introspected, these names are listed in the resulting introspection XML, which improves the description of object’s interfaces:
concatenator->registerMethod("concatenate") .onInterface(interfaceName) .withInputParamNames("numbers", "separator") .withOutputParamNames("concatenatedString") .implementedAs(&concatenate); concatenator->registerSignal("concatenated") .onInterface(interfaceName) .withParameters<std::string>("concatenatedString");
Accessing a corresponding D-Bus message
The convenience API hides away the level of D-Bus messages. But the messages carry with them additional information that may need in some implementations. For example, a name of a method call sender; or info on credentials. Is there a way to access a corresponding D-Bus message in a high-level callback handler?
Yes, there is – we can access the corresponding D-Bus message in:
- method implementation callback handlers (server side),
- property set implementation callback handlers (server side),
- signal callback handlers (client side).
Both IObject and IProxy provide the getCurrentlyProcessedMessage() method. This method is meant to be called from within a callback handler. It returns a pointer to the corresponding D-Bus message that caused invocation of the handler. The pointer is only valid (dereferenceable) as long as the flow of execution does not leave the callback handler. When called from other contexts/threads, the pointer may be both zero or non-zero, and its dereferencing is undefined behavior.
An excerpt of the above example of concatenator modified to print out a name of the sender of method call:
auto concatenate = [&concatenator](const std::vector<int> numbers, const std::string& separator)
{
const auto* methodCallMsg = concatenator->getCurrentlyProcessedMessage();
std::cout << "Sender of this method call: " << methodCallMsg.getSender() << std::endl;
/*...*/
};
Implementing the Concatenator example using generated C++ bindings
sdbus-c++ ships with native C++ binding generator tool called sdbus-c++-xml2cpp. The tool is very similar to dbusxx-xml2cpp tool that comes with the dbus-c++ library.
The generator tool takes D-Bus XML IDL description of D-Bus interfaces on its input, and can be instructed to generate one or both of these: an adaptor header file for use on the server side, and a proxy header file for use on the client side. Like this:
sdbus-c++-xml2cpp concatenator-bindings.xml --adaptor=concatenator-server-glue.h --proxy=concatenator-client-glue.h
The adaptor header file contains classes that can be used to implement interfaces described in the IDL (these classes represent object interfaces). The proxy header file contains classes that can be used to make calls to remote objects (these classes represent remote object interfaces).
XML description of the Concatenator interface
As an example, let’s look at an XML description of our Concatenator’s interfaces.
<?xml version="1.0" encoding="UTF-8"?>
<node name="/org/sdbuscpp/concatenator">
<interface name="org.sdbuscpp.Concatenator">
<method name="concatenate">
<arg type="ai" name="numbers" direction="in" />
<arg type="s" name="separator" direction="in" />
<arg type="s" name="concatenatedString" direction="out" />
</method>
<signal name="concatenated">
<arg type="s" name="concatenatedString" />
</signal>
</interface>
</node>
After running this through the code generator, we get the generated code that is described in the following two subsections.
concatenator-server-glue.h
For each interface in the XML IDL file the generator creates one class that represents it. The class is de facto an interface which shall be implemented by the class inheriting it. The class’ constructor takes care of registering all methods, signals and properties. For each D-Bus method there is a pure virtual member function. These pure virtual functions must be implemented in the child class. For each signal, there is a public function member that emits this signal.
Generated adaptor classes are not copyable and not moveable by design. One can create them on the heap and manage them in e.g. a std::unique_ptr if move semantics is needed (for example, when they are stored in a container).
/*
* This file was automatically generated by sdbus-c++-xml2cpp; DO NOT EDIT!
*/
#ifndef __sdbuscpp__concatenator_server_glue_h__adaptor__H__
#define __sdbuscpp__concatenator_server_glue_h__adaptor__H__
#include <sdbus-c++/sdbus-c++.h>
#include <string>
#include <tuple>
namespace org {
namespace sdbuscpp {
class Concatenator_adaptor
{
public:
static constexpr const char* INTERFACE_NAME = "org.sdbuscpp.Concatenator";
protected:
Concatenator_adaptor(sdbus::IObject& object)
: m_object(object)
{
}
Concatenator_adaptor(const Concatenator_adaptor&) = delete;
Concatenator_adaptor& operator=(const Concatenator_adaptor&) = delete;
Concatenator_adaptor(Concatenator_adaptor&&) = delete;
Concatenator_adaptor& operator=(Concatenator_adaptor&&) = delete;
~Concatenator_adaptor() = default;
void registerAdaptor()
{
m_object.addVTable( sdbus::registerMethod("concatenate").withInputParamNames("numbers", "separator").withOutputParamNames("concatenatedString").implementedAs([this](const std::vector<int32_t>& numbers, const std::string& separator){ return this->concatenate(numbers, separator); })
, sdbus::registerSignal("concatenated").withParameters<std::string>("concatenatedString")
).forInterface(INTERFACE_NAME);
}
public:
void emitConcatenated(const std::string& concatenatedString)
{
m_object.emitSignal("concatenated").onInterface(INTERFACE_NAME).withArguments(concatenatedString);
}
private:
virtual std::string concatenate(const std::vector<int32_t>& numbers, const std::string& separator) = 0;
private:
sdbus::IObject& m_object;
};
}} // namespaces
#endif
concatenator-client-glue.h
Analogously to the adaptor classes described above, there is one proxy class generated for one interface in the XML IDL file. The class is de facto a proxy to the concrete single interface of a remote object. For each D-Bus signal there is a pure virtual member function whose body must be provided in a child class. For each method, there is a public function member that calls the method remotely.
Generated proxy classes are not copyable and not moveable by design. One can create them on the heap and manage them in e.g. a std::unique_ptr if move semantics is needed (for example, when they are stored in a container).
/*
* This file was automatically generated by sdbus-c++-xml2cpp; DO NOT EDIT!
*/
#ifndef __sdbuscpp__concatenator_client_glue_h__proxy__H__
#define __sdbuscpp__concatenator_client_glue_h__proxy__H__
#include <sdbus-c++/sdbus-c++.h>
#include <string>
#include <tuple>
namespace org {
namespace sdbuscpp {
class Concatenator_proxy
{
public:
static constexpr const char* INTERFACE_NAME = "org.sdbuscpp.Concatenator";
protected:
Concatenator_proxy(sdbus::IProxy& proxy)
: m_proxy(proxy)
{
}
Concatenator_proxy(const Concatenator_proxy&) = delete;
Concatenator_proxy& operator=(const Concatenator_proxy&) = delete;
Concatenator_proxy(Concatenator_proxy&&) = delete;
Concatenator_proxy& operator=(Concatenator_proxy&&) = delete;
~Concatenator_proxy() = default;
void registerProxy()
{
m_proxy.uponSignal("concatenated").onInterface(INTERFACE_NAME).call([this](const std::string& concatenatedString){ this->onConcatenated(concatenatedString); });
}
virtual void onConcatenated(const std::string& concatenatedString) = 0;
public:
std::string concatenate(const std::vector<int32_t>& numbers, const std::string& separator)
{
std::string result;
m_proxy.callMethod("concatenate").onInterface(INTERFACE_NAME).withArguments(numbers, separator).storeResultsTo(result);
return result;
}
private:
sdbus::IProxy& m_proxy;
};
}} // namespaces
#endif
Providing server implementation based on generated adaptors
To implement a D-Bus object that implements all its D-Bus interfaces, we now need to create a class representing the D-Bus object. This class must inherit from all corresponding *_adaptor classes (a-ka object interfaces, because these classes are as-if interfaces) and implement all pure virtual member functions.
How do we do that technically? Simply, our object class just needs to inherit from AdaptorInterfaces variadic template class. We fill its template arguments with a list of all generated interface classes. The AdaptorInterfaces is a convenience class that hides a few boiler-plate details. For example, in its constructor, it creates an Object instance, and it takes care of proper initialization of all adaptor superclasses.
In our object class we need to:
- Give an implementation to the D-Bus object’s methods by overriding corresponding virtual functions,
- call
registerAdaptor()in the constructor, which makes the adaptor (the D-Bus object underneath it) available for remote calls, - call
unregisterAdaptor(), which, conversely, deregisters the adaptor from the bus.
Calling registerAdaptor() and unregisterAdaptor() was not necessary in previous sdbus-c++ versions, as it was handled by the parent class. This was convenient, but suffered from a potential pure virtual function call issue. Only the class that implements virtual functions can do the registration, hence this slight inconvenience on user’s shoulders.
#include <sdbus-c++/sdbus-c++.h>
#include "concatenator-server-glue.h"
class Concatenator : public sdbus::AdaptorInterfaces<org::sdbuscpp::Concatenator_adaptor /*, more adaptor classes if there are more interfaces*/>
{
public:
Concatenator(sdbus::IConnection& connection, sdbus::ObjectPath objectPath)
: AdaptorInterfaces(connection, std::move(objectPath))
{
registerAdaptor();
}
~Concatenator()
{
unregisterAdaptor();
}
protected:
std::string concatenate(const std::vector<int32_t>& numbers, const std::string& separator) override
{
// Return error if there are no numbers in the collection
if (numbers.empty())
throw sdbus::Error(sdbus::Error::Name{"org.sdbuscpp.Concatenator.Error"}, "No numbers provided");
// Concatenate the numbers
std::string result;
for (auto number : numbers)
{
result += (result.empty() ? std::string() : separator) + std::to_string(number);
}
// Emit the 'concatenated' signal with the resulting string
emitConcatenated(result);
// Return the resulting string
return result;
}
};
Tip: By inheriting from
sdbus::AdaptorInterfaces, we get access to the protectedgetObject()method. We can call this method inside our adaptor implementation class to access the underlyingIObjectobject.
That’s it. We now have an implementation of a D-Bus object implementing org.sdbuscpp.Concatenator interface. Let’s now create a service publishing the object.
#include "Concatenator.h"
int main(int argc, char *argv[])
{
// Create D-Bus connection to (either the system or session) bus and request a well-known name on it.
sdbus::ServiceName serviceName{"org.sdbuscpp.concatenator"};
auto connection = sdbus::createBusConnection(serviceName);
// Create concatenator D-Bus object.
sdbus::ObjectPath objectPath{"/org/sdbuscpp/concatenator"};
Concatenator concatenator(*connection, std::move(objectPath));
// Run the loop on the connection.
connection->enterEventLoop();
}
Now we have a service with a unique bus name and a D-Bus object available on it. Let’s write a client.
Providing client implementation based on generated proxies
To implement a proxy for a remote D-Bus object, we shall create a class representing the proxy object. This class must inherit from all corresponding *_proxy classes (a-ka remote object interfaces, because these classes are as-if interfaces) and – if applicable – implement all pure virtual member functions.
How do we do that technically? Simply, our proxy class just needs to inherit from ProxyInterfaces variadic template class. We fill its template arguments with a list of all generated interface classes. The ProxyInterfaces is a convenience class that hides a few boiler-plate details. For example, in its constructor, it can create a Proxy instance for us, and it takes care of proper initialization of all generated interface superclasses.
In our proxy class we need to:
- Give an implementation to signal handlers and asynchronous method reply handlers (if any) by overriding corresponding virtual functions,
- call
registerProxy()in the constructor, which makes the proxy (the D-Bus proxy object underneath it) ready to receive signals and async call replies, - call
unregisterProxy(), which, conversely, deregisters the proxy from the bus.
Calling registerProxy() and unregisterProxy() was not necessary in previous versions of sdbus-c++, as it was handled by the parent class. This was convenient, but suffered from a potential pure virtual function call issue. Only the class that implements virtual functions can do the registration, hence this slight inconvenience on user’s shoulders.
#include <sdbus-c++/sdbus-c++.h>
#include "concatenator-client-glue.h"
class ConcatenatorProxy : public sdbus::ProxyInterfaces<org::sdbuscpp::Concatenator_proxy /*, more proxy classes if there are more interfaces*/>
{
public:
ConcatenatorProxy(sdbus::ServiceName destination, sdbus::ObjectPath objectPath)
: ProxyInterfaces(std::move(destination), std::move(objectPath))
{
registerProxy();
}
~ConcatenatorProxy()
{
unregisterProxy();
}
protected:
void onConcatenated(const std::string& concatenatedString) override
{
std::cout << "Received signal with concatenated string " << concatenatedString << std::endl;
}
};
Tip: By inheriting from
sdbus::ProxyInterfaces, we get access to the protectedgetProxy()method. We can call this method inside our proxy implementation class to access the underlyingIProxyobject.
In the above example, a proxy is created that creates and maintains its own bus connection (the bus is either session bus or system bus depending on the context, see man sd_bus_open). However, there are ProxyInterfaces class template constructor overloads that also take the connection from the user as the first parameter, and pass that connection over to the underlying proxy. The connection instance is used by all interfaces listed in the ProxyInterfaces template parameter list.
Note however that there are multiple ProxyInterfaces constructor overloads, and they differ in how the proxy behaves towards the D-Bus connection. These overloads precisely map the sdbus::createProxy overloads, as they are actually implemented on top of them. See Proxy and D-Bus connection for more info. We can even create a IProxy instance on our own, and inject it into our proxy class – there is a constructor overload for it in ProxyInterfaces. This can help if we need to provide mocked implementations in our unit tests.
Now let’s use this proxy to make remote calls and listen to signals in a real application.
#include "ConcatenatorProxy.h"
#include <unistd.h>
int main(int argc, char *argv[])
{
// Create proxy object for the concatenator object on the server side
sdbus::ServiceName destination{"org.sdbuscpp.concatenator"};
sdbus::ObjectPath objectPath{"/org/sdbuscpp/concatenator"};
ConcatenatorProxy concatenatorProxy(std::move(destination), std::move(objectPath));
std::vector<int> numbers = {1, 2, 3};
std::string separator = ":";
// Invoke concatenate with some numbers
auto concatenatedString = concatenatorProxy.concatenate(numbers, separator);
assert(concatenatedString == "1:2:3");
// Invoke concatenate again, this time with no numbers and we shall get an error
try
{
auto concatenatedString = concatenatorProxy.concatenate(std::vector<int>(), separator);
assert(false);
}
catch(const sdbus::Error& e)
{
std::cerr << "Got concatenate error " << e.getName() << " with message " << e.getMessage() << std::endl;
}
// Give sufficient time to receive 'concatenated' signal from the first concatenate invocation
sleep(1);
return 0;
}
Accessing a corresponding D-Bus message
Simply combine getObject()/getProxy() and getCurrentlyProcessedMessage() methods. Both were already discussed above. An example:
class Concatenator : public sdbus::AdaptorInterfaces</*...*/>
{
public:
/*...*/
protected:
std::string concatenate(const std::vector<int32_t>& numbers, const std::string& separator) override
{
const auto* methodCallMsg = getObject().getCurrentlyProcessedMessage();
std::cout << "Sender of this method call: " << methodCallMsg.getSender() << std::endl;
/*...*/
}
};
Asynchronous server-side methods
So far in our tutorial, we have only considered simple server methods that are executed in a synchronous way. Sometimes the method call may take longer, however, and we don’t want to block (potentially starve) other clients (whose requests may take relative short time). The solution is to execute the D-Bus methods asynchronously, and return the control quickly back to the D-Bus dispatching thread. sdbus-c++ provides API supporting async methods, and gives users the freedom to come up with their own concrete implementation mechanics (one worker thread? thread pool? …).
Using basic sdbus-c++ API
This is how the concatenate method would look like if wrote it as an asynchronous D-Bus method using the basic, lower-level API of sdbus-c++:
void concatenate(sdbus::MethodCall call)
{
// Deserialize the collection of numbers from the message
std::vector<int> numbers;
call >> numbers;
// Deserialize separator from the message
std::string separator;
call >> separator;
// Launch a thread for async execution...
std::thread([numbers = std::move(numbers), separator = std::move(separator), call = std::move(call)]()
{
// Return error if there are no numbers in the collection
if (numbers.empty())
{
// Let's send the error reply message back to the client
auto reply = call.createErrorReply({"org.sdbuscpp.Concatenator.Error", "No numbers provided"});
reply.send();
return;
}
std::string result;
for (auto number : numbers)
{
result += (result.empty() ? std::string() : separator) + std::to_string(number);
}
// Let's send the reply message back to the client
auto reply = call.createReply();
reply << result;
reply.send();
// Emit 'concatenated' signal (creating and emitting signals is thread-safe)
sdbus::InterfaceName interfaceName{"org.sdbuscpp.Concatenator"};
sdbus::SignalName signalName{"concatenated"};
auto signal = g_concatenator->createSignal(interfaceName, signalName);
signal << result;
g_concatenator->emitSignal(signal);
}).detach();
}
There are a few slight differences compared to the synchronous version. Notice that we std::move the call message to the worker thread (btw we might also do input arguments deserialization in the worker thread, we don’t have to do it in the current thread and then move input arguments to the worker thread…). We need the call message there to create the reply message once we have the (normal or error) result. Creating and sending replies, as well as creating and emitting signals is thread-safe by design. Also notice that, unlike in sync methods, sending back errors cannot be done by throwing Error, since we are now in the context of the worker thread, not that of the D-Bus dispatcher thread. Instead, we pass the Error object to the createErrorReply() method of the call message (this way of sending back errors, in addition to throwing, we can actually use also in classic synchronous D-Bus methods).
Method callback signature is the same in sync and async version. That means sdbus-c++ doesn’t care how we execute our D-Bus method. We might very well in run-time decide whether we execute it synchronously, or whether (perhaps in case of longer, more complex calculations) we move the execution to a worker thread.
Convenience API
Callbacks of async methods based on convenience sdbus-c++ API have slightly different signature. They take a result object parameter in addition to other input parameters. The requirements are:
- The result holder is of type
Result<Types...>&&, whereTypes...is a list of method output argument types. - The result object must be the first physical parameter of the callback taken by r-value ref.
Resultclass template is move-only. - The callback itself is physically a void-returning function.
- Method input arguments are taken by value rather than by const ref, because we usually want to
std::movethem to the worker thread. Moving is usually a lot cheaper than copying, and it’s idiomatic. For non-movable types, this falls back to copying.
So the concatenate callback signature would change from std::string concatenate(const std::vector<int32_t>& numbers, const std::string& separator) to void concatenate(sdbus::Result<std::string>&& result, std::vector<int32_t> numbers, std::string separator):
void concatenate(sdbus::Result<std::string>&& result, std::vector<int32_t> numbers, std::string separator) override
{
// Launch a thread for async execution...
std::thread([this, methodResult = std::move(result), numbers = std::move(numbers), separator = std::move(separator)]()
{
// Return error if there are no numbers in the collection
if (numbers.empty())
{
// Let's send the error reply message back to the client
methodResult.returnError({"org.sdbuscpp.Concatenator.Error", "No numbers provided"});
return;
}
std::string result;
for (auto number : numbers)
{
result += (result.empty() ? std::string() : separator) + std::to_string(number);
}
// Let's send the reply message back to the client
methodResult.returnResults(result);
// Emit the 'concatenated' signal with the resulting string
this->emitConcatenated(result);
}).detach();
}
The Result is a convenience class that represents a future method result, and it is where we write the results (returnResults()) or an error (returnError()) which we want to send back to the client.
Registration (implementedAs()) doesn’t change. Nothing else needs to change.
Marking server-side async methods in the IDL
sdbus-c++-xml2cpp tool can generate C++ code for server-side async methods. We just need to annotate the method with org.freedesktop.DBus.Method.Async. The annotation element value must be either server (async method on server-side only) or client-server (async method on both client- and server-side):
<?xml version="1.0" encoding="UTF-8"?>
<node name="/org/sdbuscpp/concatenator">
<interface name="org.sdbuscpp.Concatenator">
<method name="concatenate">
<annotation name="org.freedesktop.DBus.Method.Async" value="server" />
<arg type="ai" name="numbers" direction="in" />
<arg type="s" name="separator" direction="in" />
<arg type="s" name="concatenatedString" direction="out" />
</method>
<signal name="concatenated">
<arg type="s" name="concatenatedString" />
</signal>
</interface>
</node>
For a real example of a server-side asynchronous D-Bus method, please look at sdbus-c++ stress tests.
Asynchronous client-side methods
sdbus-c++ also supports asynchronous approach at the client (the proxy) side. With this approach, we can issue a D-Bus method call without blocking current thread’s execution while waiting for the reply. We go on doing other things, and when the reply comes, either a given callback handler will be invoked within the context of the event loop thread, a future object returned by the async call will be set the returned value, or (with C++20) an awaitable can be co_awaited in a coroutine.
Lower-level API
Considering the Concatenator example based on lower-level API, if we wanted to call concatenate in an async way, we have several options. We can pass a callback to the proxy when issuing the call, and that callback gets invoked when the reply arrives:
int main(int argc, char *argv[])
{
/* ... */
auto callback = [](MethodReply reply, std::optional<sdbus::Error> error)
{
if (!error) // No error
{
std::string result;
reply >> result;
std::cout << "Got concatenate result: " << result << std::endl;
}
else // We've got a D-Bus error...
{
std::cerr << "Got concatenate error " << error->getName() << " with message " << error->getMessage() << std::endl;
}
}
// Invoke concatenate on given interface of the object
{
auto method = concatenatorProxy->createMethodCall(interfaceName, concatenate);
method << numbers << separator;
concatenatorProxy->callMethod(method, callback);
// When the reply comes, we shall get "Got concatenate result 1:2:3" on the standard output
}
// Invoke concatenate again, this time with no numbers and we shall get an error
{
auto method = concatenatorProxy->createMethodCall(interfaceName, concatenate);
method << std::vector<int>() << separator;
concatenatorProxy->callMethod(method, callback);
// When the reply comes, we shall get concatenation error message on the standard error output
}
/* ... */
return 0;
}
The callback is a void-returning function taking two arguments: a reference to the reply message, and a pointer to the prospective sdbus::Error instance. Empty error optional argument means that no D-Bus error occurred while making the call, and the reply message contains a valid reply. A non-empty error argument means that an error occurred during the call, and we can access the error name and message from the Error value inside the argument.
There is also an overload of this IProxy::callMethod() function taking method call timeout argument.
Another option is to use std::future-based overload of the IProxy::callMethod() function. A future object will be returned which will later, when the reply arrives, be set to contain the returned reply message. Or if the call returns an error, sdbus::Error will be thrown by std::future::get().
...
// Invoke concatenate on given interface of the object
{
auto method = concatenatorProxy->createMethodCall(interfaceName, concatenate);
method << numbers << separator;
auto future = concatenatorProxy->callMethod(method, sdbus::with_future);
try
{
auto reply = future.get(); // This will throw if call ends with an error
std::string result;
reply >> result;
std::cout << "Got concatenate result: " << result << std::endl;
}
catch (const sdbus::Error& e)
{
std::cerr << "Got concatenate error " << e.getName() << " with message " << e.getMessage() << std::endl;
}
}
A third option, available with C++20, is to use sdbus::with_awaitable to get an Awaitable<MethodReply> that can be co_awaited in a coroutine:
// In a coroutine context:
auto method = concatenatorProxy->createMethodCall(interfaceName, concatenate);
method << numbers << separator;
auto reply = co_await concatenatorProxy->callMethod(method, sdbus::with_awaitable);
std::string result;
reply >> result;
// If an error occurs, sdbus::Error is thrown when co_await completes
Convenience API
On the convenience API level, the call statement starts with callMethodAsync(), and one option is to finish the statement with uponReplyInvoke() that takes a callback handler. The callback is a void-returning function that takes at least one argument: std::optional<sdbus::Error>. All subsequent arguments shall exactly reflect the D-Bus method output arguments. A concatenator example:
int main(int argc, char *argv[])
{
/* ... */
auto callback = [](std::optional<sdbus::Error> error, const std::string& concatenatedString)
{
if (!error) // No error
std::cout << "Got concatenate result: " << concatenatedString << std::endl;
else // We got a D-Bus error...
std::cerr << "Got concatenate error " << error->getName() << " with message " << error->getMessage() << std::endl;
}
// Invoke concatenate on given interface of the object
{
concatenatorProxy->callMethodAsync("concatenate").onInterface(interfaceName).withArguments(numbers, separator).uponReplyInvoke(callback);
// When the reply comes, we shall get "Got concatenate result 1:2:3" on the standard output
}
// Invoke concatenate again, this time with no numbers and we shall get an error
{
concatenatorProxy->callMethodAsync("concatenate").onInterface(interfaceName).withArguments(std::vector<int>{}, separator).uponReplyInvoke(callback);
// When the reply comes, we shall get concatenation error message on the standard error output
}
/* ... */
return 0;
}
Empty error parameter means that no D-Bus error occurred while making the call, and subsequent arguments are valid D-Bus method return values. However, error parameter containing a value means that an error occurred during the call (and subsequent arguments are simply default-constructed), and the underlying Error instance provides us with the error name and message.
Tip: The function returns the
sdbus::PendingAsyncCallobject, a non-owning, observing handle to the async call. It can be used to query whether the call is still in progress, and to cancel the call.
Tip: There is also the
.uponReplyInvoke(callback, sdbus::return_slot);variant with thereturn_slottag, which returnsSlotobject, an owning RAII handle to the async call. This makes the client an owner of the pending async call. Letting go of the handle means cancelling the call.
Another option is to finish the async call statement with getResultAsFuture(), which is a template function which takes the list of types returned by the D-Bus method (empty list in case of void-returning method) which returns a std::future object, which will later, when the reply arrives, be set to contain the return value(s). Or if the call returns an error, sdbus::Error will be thrown by std::future::get().
The future object will contain void for a void-returning D-Bus method, a single type for a single value returning D-Bus method, and a std::tuple to hold multiple return values of a D-Bus method.
...
auto future = concatenatorProxy->callMethodAsync("concatenate").onInterface(interfaceName).withArguments(numbers, separator).getResultAsFuture<std::string>();
try
{
auto concatenatedString = future.get(); // This waits for the reply
std::cout << "Got concatenate result: " << concatenatedString << std::endl;
}
catch (const sdbus::Error& e)
{
std::cerr << "Got concatenate error " << e.getName() << " with message " << e.getMessage() << std::endl;
}
...
A third option, available with C++20, is to finish the async call statement with getResultAsAwaitable<ReturnTypes...>(), which returns an Awaitable<T> that can be co_awaited in a coroutine. The template arguments are the D-Bus method return types (empty for void-returning methods). The awaitable returns void, a single value, or a std::tuple for multiple return values:
// In a coroutine context:
auto result = co_await concatenatorProxy->callMethodAsync("concatenate")
.onInterface(interfaceName)
.withArguments(numbers, separator)
.getResultAsAwaitable<std::string>();
std::cout << "Got concatenate result: " << result << std::endl;
// If an error occurs, sdbus::Error is thrown when co_await completes
Marking client-side async methods in the IDL
sdbus-c++-xml2cpp can generate C++ code for client-side async methods. We just need to annotate the method with org.freedesktop.DBus.Method.Async. The annotation element value must be either client (async on the client-side only) or client-server (async method on both client- and server-side):
<?xml version="1.0" encoding="UTF-8"?>
<node name="/org/sdbuscpp/concatenator">
<interface name="org.sdbuscpp.Concatenator">
<method name="concatenate">
<annotation name="org.freedesktop.DBus.Method.Async" value="client" />
<arg type="ai" name="numbers" direction="in" />
<arg type="s" name="separator" direction="in" />
<arg type="s" name="concatenatedString" direction="out" />
</method>
<signal name="concatenated">
<arg type="s" name="concatenatedString" />
</signal>
</interface>
</node>
An asynchronous method can be generated as a callback-based method, std::future-based method, or C++20 awaitable-based method. This can optionally be customized through an additional org.freedesktop.DBus.Method.Async.ClientImpl annotation. Its supported values are callback, direct-callback, future and awaitable. The default behavior is callback-based method.
Generating callback-based async methods
For each client-side async method, a corresponding on<MethodName>Reply pure virtual function, where <MethodName> is the capitalized D-Bus method name, is generated in the generated proxy class. This function is the callback invoked when the D-Bus method reply arrives, and must be provided a body by overriding it in the implementation class.
So in the specific example above, the tool will generate a Concatenator_proxy class similar to one shown in a dedicated section above, with the difference that it will also generate an additional virtual void onConcatenateReply(const std::string& concatenatedString, std::optional<sdbus::Error> error); method, which we shall override in the derived ConcatenatorProxy.
Generating direct callback-based async methods
An additional callback parameter is added to the function signature. The callback is called when the D-Bus method reply arrives. The callback can be any generic callable that takes the method output arguments (const std::string& in this example), followed by the parameter of type std::optional<sdbus::Error> error.
Generating std::future-based async methods
In this case, a std::future is returned by the method, which will later, when the reply arrives, get set to contain the return value. Or if the call returns an error, sdbus::Error will be thrown by std::future::get().
Generating awaitable-based async methods
Note: This requires C++20 support. The generated code uses
sdbus::Awaitable<T>which requires compiling with C++20 or newer.
When using awaitable as the ClientImpl annotation value, the generated method returns an sdbus::Awaitable<T> that can be used with C++20 coroutines. The return type T is void for void-returning D-Bus methods, a single type for single-value methods, or std::tuple<Types...> for multi-value methods.
Example annotation:
<method name="concatenate">
<annotation name="org.freedesktop.DBus.Method.Async" value="client" />
<annotation name="org.freedesktop.DBus.Method.Async.ClientImpl" value="awaitable" />
<arg type="ai" name="numbers" direction="in" />
<arg type="s" name="separator" direction="in" />
<arg type="s" name="concatenatedString" direction="out" />
</method>
This generates a method that can be co_awaited: std::string result = co_await proxy.concatenate({1, 2, 3}, ":");
For a real example of a client-side asynchronous D-Bus methods, please look at sdbus-c++ stress tests and integration tests.
Method call timeout
Annotate the element with org.freedesktop.DBus.Method.Timeout in order to specify the timeout value for the method call. The value should be a number of microseconds or number with duration literal (us/ms/s/min). Optionally combine it with org.freedesktop.DBus.Method.Async.
<?xml version="1.0" encoding="UTF-8"?>
<node>
<interface name="org.bluez.Device1">
<method name="Connect">
<annotation name="org.freedesktop.DBus.Method.Async" value="client"/>
<annotation name="org.freedesktop.DBus.Method.Timeout" value="3000ms"/>
</method>
<method name="Disconnect">
<annotation name="org.freedesktop.DBus.Method.Async" value="client"/>
<annotation name="org.freedesktop.DBus.Method.Timeout" value="2000000"/> <!-- 2000000us -->
</method>
</interface>
</node>
Using D-Bus properties
sdbus-c++ provides functionality for convenient working with D-Bus properties, on both convenience and generated code API level.
Convenience API
Let’s say a remote D-Bus object provides property status of type u under interface org.sdbuscpp.Concatenator.
Reading a property
We read property value easily through IProxy::getProperty() method:
uint32_t status = proxy->getProperty("status").onInterface("org.sdbuscpp.Concatenator");
Getting a property in asynchronous manner is also possible, in callback-based, future-based, or (with C++20) awaitable way, by calling IProxy::getPropertyAsync() method:
// Callback-based method:
auto callback = [](std::optional<sdbus::Error> /*error*/, sdbus::Variant value)
{
std::cout << "Got property value: " << value.get<uint32_t>() << std::endl;
};
uint32_t status = proxy->getPropertyAsync("status").onInterface("org.sdbuscpp.Concatenator").uponReplyInvoke(std::move(callback));
// Future-based method:
std::future<sdbus::Variant> statusFuture = object.getPropertyAsync("status").onInterface("org.sdbuscpp.Concatenator").getResultAsFuture();
...
std::cout << "Got property value: " << statusFuture.get().get<uint32_t>() << std::endl;
// Awaitable method (C++20):
auto value = co_await proxy->getPropertyAsync("status").onInterface("org.sdbuscpp.Concatenator").getResultAsAwaitable();
std::cout << "Got property value: " << value.get<uint32_t>() << std::endl;
More information on an error callback handler parameter, on behavior of future in erroneous situations, can be found in section Asynchronous client-side methods.
Writing a property
Writing a property is equally simple, through IProxy::setProperty():
uint32_t status = ...;
proxy->setProperty("status").onInterface("org.sdbuscpp.Concatenator").toValue(status);
Setting a property in asynchronous manner is also possible, in callback-based, future-based, or awaitable way, by calling IProxy::setPropertyAsync() method:
// Callback-based method:
auto callback = [](std::optional<sdbus::Error> error { /*... Error handling in case error contains a value...*/ };
uint32_t status = proxy->setPropertyAsync("status").onInterface("org.sdbuscpp.Concatenator").toValue(status).uponReplyInvoke(std::move(callback));
// Future-based method:
std::future<void> statusFuture = object.setPropertyAsync("status").onInterface("org.sdbuscpp.Concatenator").getResultAsFuture();
// Awaitable method (C++20):
co_await proxy->setPropertyAsync("status").onInterface("org.sdbuscpp.Concatenator").toValue(status).getResultAsAwaitable();
More information on error callback handler parameter, on behavior of future in erroneous situations, can be found in section Asynchronous client-side methods.
Getting all properties
In a very analogous way, with both synchronous and asynchronous options, it’s possible to read all properties of an object under given interface at once. IProxy::getAllProperties() is what you’re looking for.
Generated bindings API
Defining and working with D-Bus properties using XML description is quite easy.
Defining a property in the IDL
A property element has no arg child element. It just has the attributes name, type and access, which are all mandatory. The access attribute allows the values ‘readwrite’, ‘read’, and ‘write’.
An example of a read-write property status:
<?xml version="1.0" encoding="UTF-8"?>
<node name="/org/sdbuscpp/propertyprovider">
<interface name="org.sdbuscpp.PropertyProvider">
<!--...-->
<property name="status" type="u" access="readwrite"/>
<!--...-->
</interface>
</node>
The property may also have annotations. In addition to standard annotations defined in D-Bus specification, there are sdbus-c++-specific ones, discussed further below.
Generated C++ bindings
This is how generated adaptor and proxy classes would look like with the read-write status property. The adaptor:
class PropertyProvider_adaptor
{
/*...*/
public:
PropertyProvider_adaptor(sdbus::IObject& object)
: m_object(object)
{
}
/*...*/
void registerAdaptor()
{
m_object.addVTable( sdbus::registerProperty("status").withGetter([this](){ return this->status(); }).withSetter([this](const uint32_t& value){ this->status(value); })
).forInterface(INTERFACE_NAME);
}
private:
// property getter
virtual uint32_t status() = 0;
// property setter
virtual void status(const uint32_t& value) = 0;
/*...*/
};
#endif
The proxy:
class PropertyProvider_proxy
{
/*...*/
public:
// getting the property value
uint32_t status()
{
return m_object.getProperty("status").onInterface(INTERFACE_NAME).get<uint32_t>();
}
// setting the property value
void status(const uint32_t& value)
{
m_object.setProperty("status").onInterface(INTERFACE_NAME).toValue(value);
}
/*...*/
};
When implementing the adaptor, we simply need to provide the body for the status getter and setter methods by overriding them. Then in the proxy, we just call them.
Client-side asynchronous properties
We can mark the property so that the generator generates either asynchronous variant of getter method, or asynchronous variant of setter method, or both. Annotations names are org.freedesktop.DBus.Property.Get.Async, or org.freedesktop.DBus.Property.Set.Async, respectively. Their values must be set to client.
In addition, we can choose through annotations org.freedesktop.DBus.Property.Get.Async.ClientImpl, or org.freedesktop.DBus.Property.Set.Async.ClientImpl, respectively, whether a callback-based, future-based, or awaitable variant will be generated. Supported values are callback, future, and awaitable. The concept is analogous to the one for asynchronous D-Bus methods described above in this document.
The callback-based method will generate a pure virtual function On<PropertyName>Property[Get|Set]Reply(), which must be overridden by the derived class.
For example, this description:
<?xml version="1.0" encoding="UTF-8"?>
<node name="/org/sdbuscpp/propertyprovider">
<interface name="org.sdbuscpp.PropertyProvider">
<!--...-->
<property name="status" type="u" access="readwrite">
<annotation name="org.freedesktop.DBus.Property.Get.Async" value="client"/>
<annotation name="org.freedesktop.DBus.Property.Get.Async.ClientImpl" value="callback"/>
</property>
<!--...-->
</interface>
</node>
will get generated into this C++ code on client side:
class PropertyProvider_proxy
{
/*...*/
virtual void onStatusPropertyGetReply(const uint32_t& value, std::optional<sdbus::Error> error) = 0;
public:
// getting the property value
sdbus::PendingAsyncCall status()
{
return m_object.getPropertyAsync("status").onInterface(INTERFACE_NAME).uponReplyInvoke([this](std::optional<sdbus::Error> error, const sdbus::Variant& value){ this->onStatusPropertyGetReply(value.get<uint32_t>(), std::move(error)); });
}
// setting the property value
void status(const uint32_t& value)
{
m_object.setProperty("status").onInterface(INTERFACE_NAME).toValue(value);
}
/*...*/
};
In addition to custom generated code for getting/setting properties, org.freedesktop.DBus.Properties standard D-Bus interface, implemented through pre-defined sdbus::Properties_proxy in sdbus-c++/StandardInterfaces.h, can also be used for reading/writing properties. See next section.
Standard D-Bus interfaces
sdbus-c++ provides support for standard D-Bus interfaces. These are:
org.freedesktop.DBus.Peerorg.freedesktop.DBus.Introspectableorg.freedesktop.DBus.Propertiesorg.freedesktop.DBus.ObjectManager
The implementation of methods that these interfaces define is provided by the library. Peer, Introspectable and Properties are automatically part of interfaces of every D-Bus object. ObjectManager is not automatically present and has to be enabled by the client when using IObject API. When using generated ObjectManager_adaptor, ObjectManager is enabled automatically in its constructor.
Pre-generated *_proxy and *_adaptor convenience classes for these standard interfaces are located in sdbus-c++/StandardInterfaces.h. To use them, we simply have to add them as additional parameters of sdbus::ProxyInterfaces or sdbus::AdaptorInterfaces class template, and our proxy or adaptor class inherits convenience functions from those interface classes.
For example, for our Concatenator example above in this tutorial, we may want to conveniently emit a PropertyChanged signal under org.freedesktop.DBus.Properties interface. First, we must augment our Concatenator class to also inherit from org.freedesktop.DBus.Properties interface: class Concatenator : public sdbus::AdaptorInterfaces<org::sdbuscpp::Concatenator_adaptor, sdbus::Properties_adaptor> {...};, and then we just issue emitPropertiesChangedSignal function of our adaptor object.
Note that signals of afore-mentioned standard D-Bus interfaces are not emitted by the library automatically. It’s you, the user of sdbus-c++, who are supposed to emit them.
Working examples of using standard D-Bus interfaces can be found in sdbus-c++ integration tests or the examples directory.
Representing D-Bus Types in sdbus-c++
sdbus-c++ provides many default, pre-defined C++ type representations for D-Bus types. The table below shows which C++ type corresponds to which D-Bus type.
| Category | Code | Code ASCII | Conventional Name | C++ Type |
|---|---|---|---|---|
| reserved | 0 | NUL | INVALID | - |
| fixed, basic | 121 | y | BYTE | uint8_t |
| fixed, basic | 98 | b | BOOLEAN | bool |
| fixed, basic | 110 | n | INT16 | int16_t |
| fixed, basic | 113 | q | UINT16 | uint16_t |
| fixed, basic | 105 | i | INT32 | int32_t |
| fixed, basic | 117 | u | UINT32 | uint32_t |
| fixed, basic | 120 | x | INT64 | int64_t |
| fixed, basic | 116 | t | UINT64 | uint64_t |
| fixed, basic | 100 | d | DOUBLE | double |
| string-like, basic | 115 | s | STRING | const char*, std::string |
| string-like, basic | 111 | o | OBJECT_PATH | sdbus::ObjectPath |
| string-like, basic | 103 | g | SIGNATURE | sdbus::Signature |
| container | 97 | a | ARRAY | std::vector<T>, std::array<T>, std::span<T> - if used as an array followed by a single complete type T std::map<T1, T2>, std::unordered_map<T1, T2> - if used as an array of dict entries |
| container | 114,40,41 | r() | STRUCT | sdbus::Struct<T1, T2, ...> variadic class template |
| container | 118 | v | VARIANT | sdbus::Variant, std::variant<T1, ...> |
| container | 101,123,125 | e{} | DICT_ENTRY | - |
| fixed, basic | 104 | h | UNIX_FD | sdbus::UnixFd |
| reserved | 109 | m | (reserved) | - |
| reserved | 42 | * | (reserved) | - |
| reserved | 63 | ? | (reserved) | - |
| reserved | 64,38,94 | @&^ | (reserved) | - |
A few examples:
- The D-Bus signature of an output argument of method
GetManagedObjects()on standard interfaceorg.freedesktop.DBus.ObjectManagerisa{oa{sa{sv}}}. For this the corresponding C++ method return type is:std::map<sdbus::ObjectPath, std::map<std::string, std::map<std::string, sdbus::Variant>>>. - Or an input argument of method
InterfacesRemovedon that interface has signatureas. Ths corresponds to the C++ parameter of typestd::vector<std::string>. - Or a D-Bus signature
a(bdh)corresponds to the array of D-Bus structures:std::vector<sdbus::Struct<bool, double, sdbus::UnixFd>>.
To see how C++ types are mapped to D-Bus types (including container types) in sdbus-c++, have a look at individual specializations of sdbus::signature_of class template in TypeTraits.h header file. For more examples of type mappings, look into TypeTraits unit tests.
For more information on basic D-Bus types, D-Bus container types, and D-Bus type system in general, make sure to consult the D-Bus specification.
Adding user-defined types to the sdbus-c++ type system
The above mapping between D-Bus and C++ types is what sdbus-c++ provides by default. However, the mapping can be extended. We can implement additional mapping between a D-Bus type and our custom type, i.e. teach sdbus-c++ to recognize and accept our own C++ types.
We need two things to do that:
- implement
sdbus::Messageinsertion (serialization) and extraction (deserialization) operators, so sdbus-c++ knows how to serialize/deserialize our custom type, - specialize
sdbus::signature_oftemplate for our custom type, so sdbus-c++ knows the mapping to D-Bus type and other necessary information about our type.
Say, we would like to represent D-Bus arrays as std::lists in our application. Since sdbus-c++ comes with pre-defined support for std::vectors, std::arrays and std::spans as D-Bus array representations, we have to provide an extension. To implement message serialization and deserialization functions for std::list, we can simply copy the sdbus-c++ implementation of these functions for std::vector, and simply adjust for std::list. Then we provide signature_of specialization, again written in terms of one specialized for std::vector:
#include <list>
#include <sdbus-c++/sdbus-c++.h>
namespace sdbus {
// Implementing serialization for std::list
template <typename _ElementType>
sdbus::Message& operator<<(sdbus::Message& msg, const std::list<_ElementType>& items)
{
msg.openContainer<_ElementType>();
for (const auto& item : items)
msg << item;
msg.closeContainer();
return msg;
}
// Implementing deserialization for std::list
template <typename _ElementType>
sdbus::Message& operator>>(sdbus::Message& msg, std::list<_ElementType>& items)
{
if(!msg.enterContainer<_ElementType>())
return msg;
while (true)
{
_ElementType elem;
if (msg >> elem)
items.emplace_back(std::move(elem));
else
break;
}
msg.clearFlags();
msg.exitContainer();
return msg;
}
} // namespace sdbus
// Implementing type traits for std::list -- we re-use by inheriting
// from type traits already provided by sdbus-c++ for D-Bus arrays
template <typename _Element, typename _Allocator>
struct sdbus::signature_of<std::list<_Element, _Allocator>>
: sdbus::signature_of<std::vector<_Element>>
{};
Then we can simply use std::lists, serialize/deserialize them in a D-Bus message, in D-Bus method calls or return values… and they will be simply transmitted as D-Bus arrays.
Similarly, say we have our own lockfree_map which we would like to use natively with sdbus-c++ as a C++ type for D-Bus dictionary – we can copy or build on top of std::map specializations.
Teaching sdbus-c++ about user-defined structs
There is SDBUSCPP_REGISTER_STRUCT macro that we can use to teach sdbus-c++ about our structs and unlock some struct-related convenience functionality.
Say we have our custom type my::Struct:
namespace my {
struct Struct
{
int i;
std::string s;
std::list<double> l;
};
} // namespace my
This is how we introduce the struct to sdbus-c++:
SDBUSCPP_REGISTER_STRUCT(my::Struct, i, s, l);
The macro must be placed in the global namespace. The first argument is the struct type name and the remaining arguments are names of struct members. Of course, struct members must be of types supported by sdbus-c++ (or of user-defined types that sdbus-c++ was taught to recognize). This also means that members can be other structs – provided that sdbus-c++ was taught about them with SDBUSCPP_REGISTER_STRUCT prior to this one.
SDBUSCPP_REGISTER_STRUCT enables us:
- to use user-defined structs in place of (more generic, less expressive)
sdbus::Structs - to serialize a user-defined struct as a dictionary of strings to variants (
a{sv}dictionary) - to deserialize the
a{sv}dictionary into a user-defined struct.
This is described in detail in the following sections.
Note: The macro supports max 16 struct members. If you need more, feel free to open an issue, or implement the teaching code yourself :o)
Another note: You may have noticed one of
my::Structmembers isstd::list. Thanks to the custom support forstd::listimplemented higher above, it’s now automatically accepted by sdbus-c++ as a D-Bus array representation.
Using user-defined structs in place of sdbus::Struct
Many times, we have our own structs defined in our business logic code, and it would be very convenient to pass these structs directly to or from the sdbus-c++ IPC API where a D-Bus struct is expected, without having to translate them to or from sdbus::Struct.
For example, a D-Bus method foo that takes an argument of signature (isad) can simply be called with my::Struct instance instead of sdbus::Struct<int, std::string, std::vector<dobule>> instance:
my::Struct s{77, "hello"s, {3.14, 285.9}};
proxy->callMethod("foo").onInterface(INTERFACE_NAME).withArguments(s);
For this purpose, the macro simply generates the sdbus::Message serialization and deserialization operators and the type traits (the sdbus::signature_of specialization) for my::Struct.
Nesting structs is supported by default.
Serializing a user-defined struct as the a{sv} dictionary
SDBUSCPP_REGISTER_STRUCT macro additionally teaches sdbus-c++ to serialize our structs as a{sv} dictionaries. This can be quite a handy feature.
For example, a D-Bus method foo that takes an argument of signature a{sv} can be passed my::Struct instance:
my::Struct s{77, "hello"s, {3.14, 285.9}};
proxy->callMethod("foo").onInterface(INTERFACE_NAME).withArguments(sdbus::as_dictionary(s));
Decorating the struct instance with sdbus::as_dictionary() instructs sdbus-c++ to serialize the struct as an a{sv} dictionary, with struct field name being the key and struct field value being the value. Here is a C++ representation of the resulting dictionary:
std::map<std::string, sdbus::Variant> dicti, {"s"s, sdbus::Variant{"hello"s}}, {"l"s, sdbus::Variant{std::list<double>{3.14, 285.9}}}};
The default struct-as-dict serialization strategy is single-level (as opposed to nested). Single-level means that struct members that are structs themselves are serialized as D-Bus structs (the variant in the dict entry contains a struct value). Nested means that also struct members that are structs are all serialized as an a{sv} dictionary (the variant in the dict entry contains a{sv} dictionary). We can turn on nested serialization with the SDBUSCPP_ENABLE_NESTED_STRUCT2DICT_SERIALIZATION macro:
SDBUSCPP_ENABLE_NESTED_STRUCT2DICT_SERIALIZATION(my::Struct);
If nested strategy is also enabled for the nested struct type, then the same behavior applies for that struct, recursively. (It goes without saying that member struct type needs to be registered through SDBUSCPP_REGISTER_STRUCT macro, too.)
The macro must be placed before the SDBUSCPP_REGISTER_STRUCT(my::Struct); macro.
Deserializing the a{sv} dictionary into a user-defined struct
Another handy feature enabled by the SDBUSCPP_REGISTER_STRUCT macro is an automatic deserialization of a{sv} dictionaries to user-defined structs.
For example, a D-Bus signal bar that carries data of signature a{sv} can be deserialized not only into a C++ dictionary type, but also directly into a user-defined struct, leading to shorter and more natural code:
proxy->uponSignal("bar").onInterface(INTERFACE_NAME).call([](const my::Struct& s){ std::cout << "Got signal with s.i == " << s.i << "\n"; });
How easy and convenient, right?
The requirements:
- All keys in the dictionary must exactly match the names of fields in the struct. Ordering of struct fields vs. items in the dictionary is irrelevant; the field in the struct is found by its name given by the dict key. If the corresponding struct field is not found,
sdbus::Errorexception is thrown. - The type of value in the dictionary item and the corresponding struct field must also exactly match. Otherwise,
sdbus::Errorexception is thrown.
The first bullet point is a so-called strict dict-to-struct deserialization strategy. There is also a relaxed one – meaning that a dict entry key that does not have a matching struct member counterpart is not an error and is silently skipped. We can turn on relaxed deserialization with the SDBUSCPP_ENABLE_RELAXED_DICT2STRUCT_DESERIALIZATION macro:
SDBUSCPP_ENABLE_RELAXED_DICT2STRUCT_DESERIALIZATION(my::Struct);
The macro must be placed before the SDBUSCPP_REGISTER_STRUCT(my::Struct); macro.
Real examples of extending sdbus-c++ types, including the use of all above-mentioned struct-related macros, can be found in Message unit tests and also in test case SdbusTestObject.CanSendAndReceiveDictionariesAsCustomStructsImplicitly in integration tests.
Happy structing!
Wait!: You might say. What about XML IDL and generated C++ bindings? Well, there is no user-defined struct support in there. Yet. An extended XML syntax would be required. But we may implement something like that in the future (and you can help us).
Support for match rules
IConnection class provides addMatch and addMatchAsync family of methods that you can use to install match rules on that bus connection. An associated callback handler will be called when an incoming D-Bus message matches the given match rule. Clients can decide whether they own and control the match rule lifetime, or whether the match rule lifetime is bound the connection object lifetime (so-called floating match rule). Consult IConnection header or sdbus-c++ doxygen documentation for more information.
Using direct (peer-to-peer) D-Bus connections
sdbus-c++ provides an API to establish a direct connection between two peers – between a client and a server, without going via the D-Bus daemon. The methods of interest, which will create a D-Bus server bus, and a client connection to it, respectively, are:
sdbus::createServerBus()creates and returns a new, custom bus object in server mode, out of provided file descriptor parameter.sdbus::createDirectBusConnection()opens and returns direct D-Bus connection at the provided custom address(es), or at the provided file descriptor.
Here is an example, extracted from the analogous test case in sdbus-c++ integration tests suite:
#include "Concatenator.h"
#include "ConcatenatorProxy.h"
#include <sdbus-c++/sdbus-c++.h>
#include <sys/types.h>
#include <sys/socket.h>
int main(int argc, char *argv[])
{
int fds[2];
socketpair(AF_UNIX, SOCK_STREAM, 0, fds);
std::unique_ptr<sdbus::IConnection> serverConnection;
std::unique_ptr<sdbus::IConnection> clientConnection;
std::thread t([&]()
{
serverConnection = sdbus::createServerBus(fds[0]);
// This is necessary so that createDirectBusConnection() below does not block
serverConnection->enterEventLoopAsync();
});
clientConnection = sdbus::createDirectBusConnection(fds[1]);
clientConnection->enterEventLoopAsync();
t.join();
// We can now use connection objects in a familiar way, e.g. create adaptor and proxy objects on them, and exchange messages.
// Here, using Concatenator IDL-generated bindings example from chapters above:
Concatenator concatenator(*serverConnection, sdbus::ObjectPath{"/org/sdbuscpp/concatenator"});
sdbus::ServiceName emptyDestination; // Destination may be empty in case of direct connections
ConcatenatorProxy concatenatorProxy(*clientConnection, std::move(emptyDestination), sdbus::ObjectPath{"/org/sdbuscpp/concatenator"});
// Perform call of concatenate D-Bus method
std::vector<int> numbers = {1, 2, 3};
std::string separator = ":";
auto concatenatedString = concatenatorProxy.concatenate(numbers, separator);
assert(concatenatedString == "1:2:3");
// Explicitly stop working on socket fd's to avoid "Connection reset by peer" errors
clientConnection->leaveEventLoop();
serverConnection->leaveEventLoop();
}
Note: The example above explicitly stops the event loops on both sides, before the connection objects are destroyed. This avoids potential
Connection reset by peererrors caused when one side closes its socket while the other side is still working on the counterpart socket. This is a recommended workflow for closing direct D-Bus connections.
Using sdbus-c++ in external event loops
sdbus-c++ connections can be hooked up with an external (like GMainLoop, boost::asio, etc.) or manual event loop involving poll() or a similar I/O polling call. The following describes how to integrate it correctly:
Before each invocation of the I/O polling call, IConnection::getEventLoopPollData() function should be invoked. Returned PollData::fd file descriptor should be polled for the events indicated by PollData::events, and the I/O call should block up to the returned PollData::timeout. Additionally, returned PollData::eventFd should be polled for POLLIN events.
After each I/O polling call (for both PollData::fd and PollData::eventFd events), the IConnection::processPendingEvent() method should be invoked. This enables the bus connection to process any incoming or outgoing D-Bus messages.
Note that the returned timeout should be considered only a maximum sleeping time. It is permissible (and even expected) that shorter timeouts are used by the calling program, in case other event sources are polled in the same event loop. Note that the returned time-value is absolute, based of CLOCK_MONOTONIC and specified in microseconds. Use PollData::getPollTimeout() to have the timeout value converted into a form that can be passed to poll().
PollData::fd is a bus I/O fd. PollData::eventFd is an sdbus-c++ internal fd for communicating important changes from other threads to the event loop thread, so the event loop retrieves new poll data (with updated timeout, for example) and, potentially, processes pending D-Bus messages (like signals that came in during a blocking synchronous call from other thread, or queued outgoing messages that are very big to be able to have been sent in one shot from another thread), before the next poll.
Consult IConnection::PollData and IConnection::getEventLoopPollData() documentation for potentially more information.
Integration of sd-event event loop
sdbus-c++ provides built-in integration of sd-event, which makes it very convenient to hook sdbus-c++ connection up with an sd-event event loop.
See documentation of IConnection::attachSdEventLoop(), IConnection::detachSdEventLoop(), and IConnection::getSdEventLoop() methods, or sdbus-c++ integration tests for an example of use. These methods are sdbus-c++ counterparts to and mimic the behavior of these underlying sd-bus functions: sd_bus_attach_event(), sd_bus_detach_event(), and sd_bus_get_event(). Their manual pages provide much more details about their behavior.
Migrating to sdbus-c++ v2
sdbus-c++ v2 is a major release that comes with a number of breaking API/ABI/behavior changes compared to v1. The following list describes the changes:
- Change in behavior: In synchronous D-Bus calls, the proxy object now keeps the connection instance blocked for the entire duration of the method call. Incoming messages like signals will be queued and processed after the call. Access to the connection from other threads is blocked. To avoid this (in case this hurts you):
- either use short-lived, light-weight proxies for such synchronous calls,
- or call the method in an asynchronous way.
- Strong types were introduced for safer, less error-prone and more expressive API. What previously was
auto proxy = createProxy("org.sdbuscpp.concatenator", "/org/sdbuscpp/concatenator");is now written likeauto proxy = createProxy(ServiceName{"org.sdbuscpp.concatenator"}, ObjectPath{"/org/sdbuscpp/concatenator"});. These types are:ObjectPathtype for the object path (the type has been around already but now is also used consistently in sdbus-c++ API for object path strings)InterfaceNametype for D-Bus interface namesBusName(and its aliasesServiceNameandConnectionName) type for bus/service/connection namesMemberName(and its aliasesMethodName,SignalNameandPropertyName) type for D-Bus method, signal and property namesSignaturetype for the D-Bus signature (the type has been around already but now is also used consistently in sdbus-c++ API for signature strings)Error::Nametype for D-Bus error names
- Signatures of callbacks
async_reply_handler,signal_handler,message_handlerandproperty_set_callbackwere modified to take input message objects by value instead of non-const ref to a message. The callback handler assumes ownership of the message. This API is cleaner and more self-explaining. - The
PollDatastruct has been extended with a new data member:eventFd. All hooks with external event loops shall be modified to poll on thiseventFdin addition to thefd. PollData::timeout_usecwas renamed toPollData::timeoutand its type has been changed tostd::chrono::microseconds. This member now holds directly what before had to be obtained throughPollData::getAbsoluteTimeout()call.PollData::getRelativeTimeout()return type was changed tostd::chrono::microseconds.IConnection::processPendingRequest()was renamed toIConnection::processPendingEvent().Variantconstructor is now explicit.Variant’s conversion operator to the underlying type is now explicit.IProxy::getCurrentlyProcessedMessage()now returnsMessageby value instead of a raw pointer to it. The caller assumes ownership of the message.- Object D-Bus API registration is now done through
IObject::addVTable()method. The vtable gets active immediately. NofinishRegistration()call is needed anymore. vtables can be added and removed dynamically at run time. In addition to API simplification this brings consistency with sd-bus API and increases flexibility. - Subscription to signals has been simplified. The subscription is active right after the
registerSignalHandler/uponSignal()call. No need for the final call tofinishRegistration(). IProxy::muteSignal()andIProxy::unregisterSignal()have been removed. When subscribing to a signal, we can ask sdbus-c++ to give us a RAII-based slot object. As long as we keep the slot, the subscription is active. Destroying the slot object implies unsubscribing from the signal.request_slottag was renamed toreturn_slot.- Deprecated
dont_request_slotwas removed. It shall be replaced withfloating_slot. ProxyInterfaces::getObjectPath()was removed. It shall be replaced withProxyInterfaces::getProxy().getObjectPath().AdaptorInterfaces::getObjectPath()was removed. It can be replaced withAdaptorInterfaces::getObject().getObjectPath().createConnection()has been removed. To create a connection to the system bus usecreateSystemConnection()instead.createDefaultBusConnection()has been renamed tocreateBusConnection().IObject::removeObjectManager()andIObject::hasObjectManager()were removed. Clients should now use the slot-returningIObject::addObjectManager()to control theObjectManagerinterface lifetime.floating_slot_ttag was removed fromIConnection::addObjectManager(), the function is now by default floating-slot-based.- Slot-returning
IConnection::addMatch()has gotten thereturn_slot_ttag parameter, whilefloating_slot_twas removed from the floating slot-based overload of the method. - Slot-returning
IConnection::addMatchAsync()has gotten thereturn_slot_ttag parameter, whilefloating_slot_twas removed from the floating slot-based overload of the method. - Change in behavior:
Proxys now by default callcreateBusConnection()to get a connection when the connection is not provided explicitly by the caller, so they connect to either the session bus or the system bus depending on the context (as opposed to always to the system bus like before). - Callbacks taking
const sdbus::Error* errorwere changed to takestd::optional<sdbus::Error>, which better expresses the intent and meaning. getInterfaceName(),getMemberName(),getSender(),getPath()andgetDestination()methods ofMessageclass now returnconst char*instead ofstd::string, for efficiency reasons.peekType()method ofMessageclass now returns a pair ofchar(type signature) andconst char*(contents signature), for expressiveness and efficiency reasons.- D-Bus signatures when using high-level API are now assembled at compile time. There are breaking changes inside
signature_oftype traits andMessageserialization/deserialization methods. This only interests you if you extend sdbus-c++ type system with your own types. See the updated tutorial on extending sdbus-c++ type system. - Generated adaptor and proxy classes are not moveable anymore.
- Types and methods marked deprecated in sdbus-c++ v1 were removed completely.
- CMake options got
SDBUSCPP_prefix for better usability and minimal risk of conflicts in downstream CMake projects.SDBUSCPP_INSTALLCMake option was added. - CMake components got
sdbus-c++-prefix.
An important note: C++ bindings generated from XML files must be re-generated with the new sdbus-c++-xml2cpp when migrating to sdbus-c++ v2.0.
Conclusion
There is no conclusion. Happy journeys by D-Bus with sdbus-c++!